
“Avante la máquina”; “Avante la máquina… máquina avante”; “Estribor 5 grados de caña”; “Estribor 5 grados de caña…5 grados de caña a estribor.”
Interacciones como estas son habituales en los puentes de mando de unidades navales y son las que permiten una navegación segura, a través del control de la dirección y propulsión del buque. Hasta hoy.
Durante el verano de este año 2018, se desarrollaron las pruebas operacionales en la mar del USS Sea Hunter, una unidad desarrollada para la Armada de Estados Unidos por Bluefin robotics en conjunto con TNO y Diginext, donde las voces de mando como las indicadas anteriormente, no son necesarias.
El Sea Hunter es un trimarán completamente autónomo de 40 m de eslora, un desplazamiento de 135 t, una velocidad máxima de 27 nudos y una autonomía de 70 días. Esta unidad es controlada completamente a través de inteligencia artificial, siendo capaz de zarpar, navegar y recalar a puerto sin la necesidad de control humano. Su principal rol es antisubmarino y está programada para planificar y ejecutar las acciones necesarias para cumplir con su tarea.
Recientemente fue traspasado a la oficina investigación de la Armada de Estados Unidos, donde se continuará su desarrollo y se estudiará la ampliación de sus roles.[1] Este hecho marca un hito importante para la integración de sistemas robóticos en tareas propias de la guerra en el mar que, hasta hoy, eran desarrolladas exclusivamente por seres humanos.
Si bien el empleo de sistemas autónomos y robóticos en el ámbito naval no es nuevo, no es hasta el inicio de este siglo, donde la investigación en vehículos autónomos e inteligencia artificial ha permitido que el desarrollo de unidades robóticas, tanto de superficie como submarinas, no parezca ciencia ficción sino una realidad.
Durante los últimos años, el desarrollo de vehículos autónomos ha vivido un auge de la mano de los vehículos aéreos no tripulados (UAV, del inglés Unmanned Aerial Vehicle o drones), utilizados en múltiples tareas, desde su utilización como blanco en pácticas de tiro o como relay de comunicaciones [2], hasta el transporte y despacho de carga [3]. También los vehículos terrestres (UGV, Unmanned Ground Vehicles) han evolucionado desde su uso para fines militares [4], hasta llegar hoy en día a poder transportar pasajeros dentro de un entorno urbano de manera segura [5]. Sin embargo, el desarrollo de vehículos marinos autónomos no ha tenido el mismo ímpetu, quedando relegado a un segundo plano al momento de comparar los avances en esta área con el de sus contrapartes aérea y terrestre. Esto se debe principalmente a las características propias del medio acuático, en condiciones submarinas las ventanas de comunicaciones son limitadas y el ancho de banda disponible está restringido, mientras que para unidades de superficie, éstas se desenvuelven en un ambiente altamente dinámico y deben interactuar con naves tripuladas.
No obstante, este último tiempo ha habido avances importantes en este ámbito, que permiten pronosticar un desarrollo sustancial en la implementación de sistemas robóticos en el ámbito naval.
Una de las áreas donde ha existido mayor inversión privada en los últimos años, es en los vehículos submarinos, tanto autónomos (AUV, Autonomous Underwater Vehicle) como teleoperados (ROV, Remotedly Operated Vehicle). Lo anterior se puede ver en la figura 1, que muestra el aumento del tamaño del mercado en Estados Unidos (principal usuario y desarrollador de este tipo de sistemas) para estas unidades, junto con hacer una proyección hasta el 2025 [6].
.
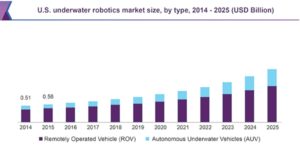
Figura 1: Evolución del mercado de robots submarinos en EE. UU. desde el año 2014, proyectado
hasta el 2025.
El desarrollo de este tipo de unidades se encuentra principalmente ligado a la investigación científica, donde el empleo de unidades autónomas ha permitido la recolección de datos de zonas a las que era impensado llegar con vehículos tripulados o teleoperados [7] y realizar tareas de inspección submarina a altas profundidades y por prolongados periodos de tiempo.
Desde el punto de vista naval, el empleo de AUV lleva décadas de desarrollo, pero recién en los últimos años éstos han alcanzado una madurez que les permite operar de manera segura en los diferentes escenarios y cumpliendo adecuadamente las tareas encomendadas. Los principales roles que cumplen este tipo de robots son en la guerra antisubmarina, como contramedidas para minas submarinas, donde son capaces de encontrar, identificar, clasificar y localizar las diferentes amenazas detectadas [8,9]. También en labores de vigilancia de zonas estratégicas, donde la capacidad de mantenerse por prolongados periodos de tiempo en una zona determinada, combinado con algoritmos que permitan identificar amenazas y tomar acciones contra éstas, hace que el empleo de AUV simplifique las labores de vigilancia, siendo necesaria solamente una estación de monitoreo en tierra con la cual los AUV se comunican en forma periódica, o al encontrar anomalías. La figura 2 presenta el HUGIN, desarrollado en conjunto por Konsberg Maritime y el Norwegian Defense Research Establishment.

Figura 2: Robot submarino HUGIN.
Por otro lado, en lugar de realizar la vigilancia con un solo robot, se puede establecer una red de robots más pequeños que en conjunto, actuando colaborativamente, forman una red inteligente [10, 11] estableciendo un sistema de vigilancia robusto, estable, escalable y altamente confiable. Un sistema de este tipo, presenta amplias ventajas con respecto a la vigilancia efectuada con un solo robot, pero agrega nuevos desafíos en las áreas de procesamiento de señales, redes de comunicación submarina e información distribuida.
Otra de las tareas desarrolladas por robots submarinos, son aquellas relacionadas con búsqueda y salvamento (SAR, Search and Rescue). En este caso se utiliza una combinación de unidades autónomas y teleoperadas. Donde el empleo de AUV permite la búsqueda, detección e identificación de los contactos de manera completamente autónoma y luego a través del uso de ROV, se pueden realizar las tareas de salvamento o salvataje necesarias.[12]
Una de las principales innovaciones en robótica submarina hoy, es la aparición de los híbridos AUV/ ROV [13, 14] (ver figura 3), los cuales combinan la capacidad de realizar largas navegaciones de inspección y la alta maniobrabilidad de un AUV, con la capacidad de realizar tareas de manipulación teleoperada y transmisión de datos de alta definición de un ROV. Lo anterior presenta una amplia ventaja al momento de realizar tareas de inspección, reparación y/o salvataje.

Figura 3: Robot híbrido AUV/ROV Aquanaut de Houston Mechatronics.
Otro tipo de robot submarino, utilizado ampliamente para la investigación científica, son los planeadores submarinos (Seaglider) [15] que, a diferencia de los ROV y AUV, no utilizan motores ni hélices para su propulsión. En cambio poseen un sistema de boyantez ajustable que les permite ascender y descender, logrando un movimiento oscilatorio que hace que puedan recorrer grandes distancias. Su baja resistencia hidrodinámica y gran control del ángulo de pitch, les permite desplazarse en un amplio rango de pendientes con un bajo consumo energético, pudiendo mantenerse operando por prolongados periodos de tiempo. El principal rol que cumplen estos robots, es el de inspección, exploración y recolección de datos, por lo que son utilizados principalmente para estudios oceanográficos, investigación del fondo marino y para la industria del petróleo y gas, en la búsqueda de nuevos yacimientos.
A pesar de que la navegación autónoma lleva décadas de desarrollo y es ampliamente utilizada en naves comerciales, el desarrollo de unidades de superficie completamente autónomas y no tripuladas (USV, Unmanned Surface Vessels) no han tenido los mismos avances que para unidades submarinas, sin embargo, se han llevado a cabo importantes mejoras en la automatización de naves de superficie.
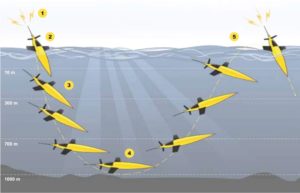
Figura 4: Diagrama de la navegación de un planeador submarino. 1: Establece comunicaciones
satelitales. 2: Se utiliza GPS para establecer la posición del robot. 3: Mientras se encuentra
sumergido, el robot utiliza sensores de presión, altímetro y un compás de 3 ejes para determinar su
posición. 4: El planeador desciende a profundidades de hasta 1000 m recolectando datos. 5:
Al aflorar, el robot transmite en forma satelital los datos recolectados a una central y descarga
nuevas instrucciones.
Tal es el caso del SeaFly (ver figura 5), un USV de 10,25 m de eslora y 3,7 m de manga, con un desplazamiento de 4,5 t, desarrollado por Beijing Sifang Automation para la Armada de la República Popular China. Capaz de realizar tareas de vigilancia y reconocimiento, recolección de información de inteligencia, protección de instalaciones costeras y guerra antisubmarina, junto con permitir el despegue y aterrizaje de un drone para ampliar sus capacidades de monitoreo. Cuenta además con la capacidad de trabajar en forma colaborativa con otras unidades del mismo tipo y de esa forma, completar una flota de USV.

Figura 5: SeaFly.
China Aerospace Science and Technology Corporation se encuentra desarrollando una unidad de combate, D3000 [16], que sea capaz de llevar a cabo tareas de guerra antisubmarina, antiaérea y de superficie, y que pueda operar tanto de manera individual, como en conjunto con unidades tripuladas.
Por su parte, el ministerio de Defensa del Reino Unido anunció las pruebas existosas de un sistema barreminas completamente autónomo ARCIMS (ATLAS Remote Combined Influence Minesweeping System) [17] (ver figura 6). Este sistema fue desarrollado por Atlas Elektronik y es capaz de realizar la planificación,ejecución y análisis de la tarea encomendada en forma autónoma, teleoperado desde una estación de control a bordo de otro buque o en tierra, o bien a través de un sistema de control combinado donde las funciones de control de alto nivel son llevadas a cabo por un operador y las de bajo nivel son dirigidas por algoritmos de inteligencia artificial que dirigen el funcionamiento del sistema.
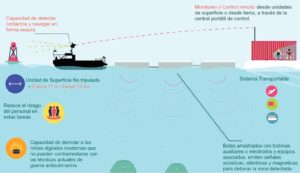
Figura 6: Diagrama descriptivo ARCIMS.
Sin duda la robótica en los sistemas navales ha alcanzado un grado de madurez suficiente, que le ha permitido salir de los laboratorios y entornos de prueba protegidos para operar en forma segura y eficiente en los diferentes teatros de operaciones. A pesar de esto, se encuentran en una etapa temprana de aceptación e incorporación en el ámbito naval.
Las principales armadas del mundo están hoy impulsando la investigación en este tipo de soluciones, en busca de aumentar la eficacia de sus sistemas, reducir el riesgo para sus dotaciones y reducir los costos asociados a la operación de unidades tripuladas. Lo anterior, ha ido incrementando el nivel de inversión, tanto pública como privada, en la investigación y desarrollo de unidades robóticas de superficie y submarinas.
La implementación de las unidades robóticas en operaciones navales, presenta desafíos técnicos importantes desde el punto de vista de la integración de sensores confiables junto con algoritmos de identificación, que hagan de la detección e identificación de contactos un proceso libre de errores.
Desde el punto de vista de las comunicaciones y transferencia de información se presentan desafíos, principalmente en las redes de robots submarinos, donde las características propias del fondo marino, hacen que la transmisión de datos sea un desafío en sí. Junto con eso, la seguridad de la información transmitida y la protección de estos sistemas ante ataques informáticos cobran una alta importancia al tratarse de sistemas de combate.
La incorporación de unidades robóticas dentro de las operaciones navales actuales, marcará un punto de inflexión en el cómo se desarrollarán éstas en un futuro no lejano. Para ello se requiere una adaptación, no sólo procedimental, sino que cultural, donde las futuras dotaciones deberán estar preparadas para trabajar en conjunto con sistemas comandados por inteligencia artificial.

La estadística actual indica que los niveles de narcotráfico vía marítima han aumentado en Chile en los últimos años (Mi...

“El crimen organizado se combate como región o no se combate (Tohá, 2024)1" Miles de millones de personas utilizan...

¿Qué entendemos por “inteligencia”? Básicamente es la capacidad de abstraer, discernir, discriminar, aprender, crear, an...

“La inteligencia artificial es el futuro no solo para Rusia, sino para toda la humanidad. Trae consigo enormes oportunid...

NOTA del Autor: Este articulo ha sido completamente escrito por una aplicación de Inteligencia Artificial (chatGPT). Se ...
Versión PDF
Año CXXXX, Volumen 143, Número 1009
Noviembre - Diciembre 2025









ÚLTIMA EDICIÓN
Noviembre - Diciembre 2025
e-ISSN: 0719-4129
ISSN: 0034-8511
Avda. Jorge Montt N° 2400, Las Salinas,
Viña del Mar.
Teléfono: +56 322 848 905
Casilla 220 Correo Central Valparaíso.
Revista indexada en Latindex 2.0
© 2026 Revista de Marina. Todos los derechos reservados.








Inicie sesión con su cuenta de suscriptor para comentar.-